
Links
The project has been simplified to provide an easy example of how to get data from blender and to send it to an arduino, and is ready to be used at once.
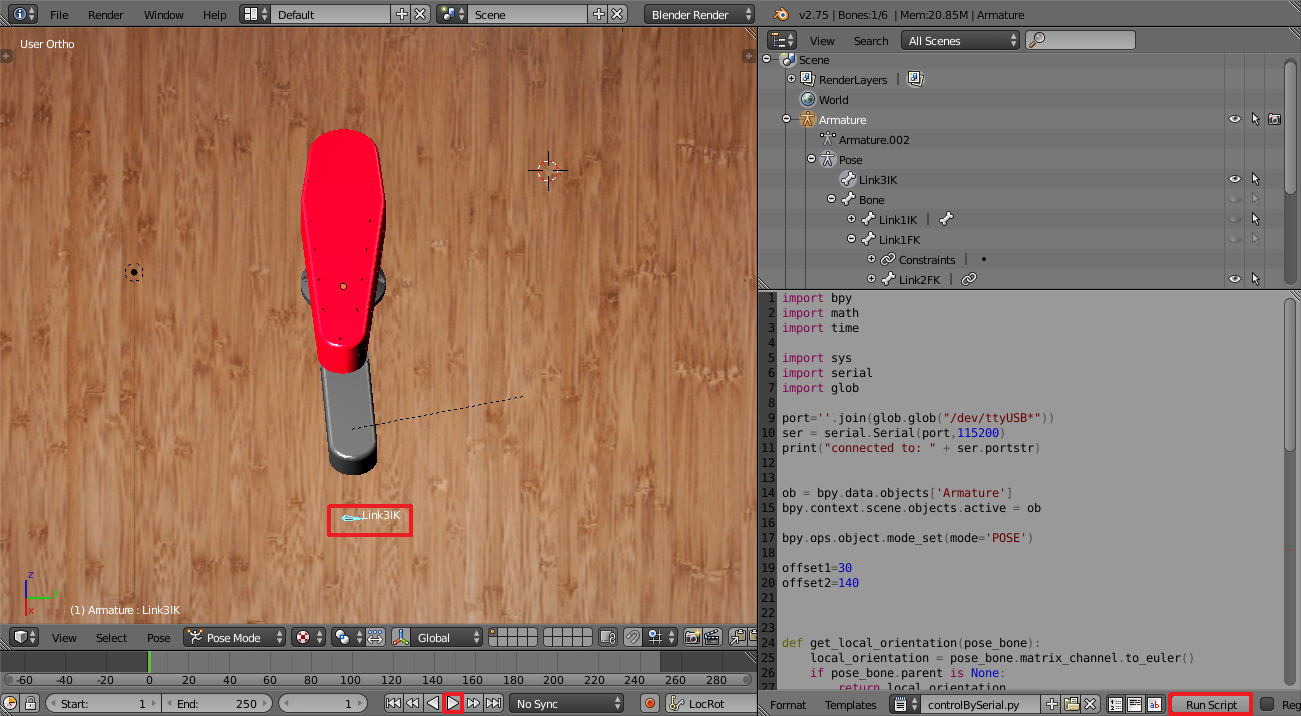
To start controlling the arm first upload the arduino code into the board. Then open Blender and press on "Run Script" and the play icon (as seen in the image below) and hover the mouse over the arm after pressing the "G" key ("Link3IK" must be selected).
This project is licensed under Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)

Dear Avarro
Thanks a lot for your project. This must be a huge work.
Thats a great work. Best wishes for your future and go on.
Dear Avarro
Can you say me, wich Pin on the Adruino did you use for the Servos. Did you use a special motor?
Thanks for your Feedback
Daniel
Hi, apparently I used pins 8 & 9, but you can change it on the code to whichever you like.
The servos were pretty large, but I don’t remember the model, sorry. The robot’s repo is here: https://github.com/JavierIH/M1R0